🤖 Duc-Cuong VU, BSc.
E-mail / ORCID / LinkedIn / Google Scholar / GitHub / CV
✍️ about me
I am pursuing an M.Sc. in Automation and Control at HUST, supervised by Assoc. Prof. Dr. Tung Lam Nguyen. My research focuses on Stewart platforms in marine environments, funded by VINIF. I hold a B.Sc. from HUST and received the Best Thesis Defense Award for my work on balancing, motion planning, and tracking control for ballbot systems.
Beside that, I am a Robotics Engineer at VinRobotics, working on control algorithms and motion planning for humanoids and industrial robots.
My interests include control theory, robotics, and bridging simulation with real-world validation. See my projects and activities for more.
📣 news
📚 selected publications

📝 Conformal-Seeded Hybrid Inverse Kinematics for Offset Redundant Manipulators
Duc-Cuong Vu, Van Tung Nguyen, Duc Hai Nguyen, Manh Cuong Nguyen, Tran Vu Trung, Andreas Kugi, and Minh Nhat Vu
submitted to TMECH/AIM Focused Section
📝 Glocal trajectory generation and tracking control for AUVs with optimal coverage sensor networks
Duc Cuong Vu*, Son Tran*, Tung Lam Nguyen, and Duc Chinh Hoang
* equal contribution
Ocean Engineering, 2025 (SCIE, Q1)
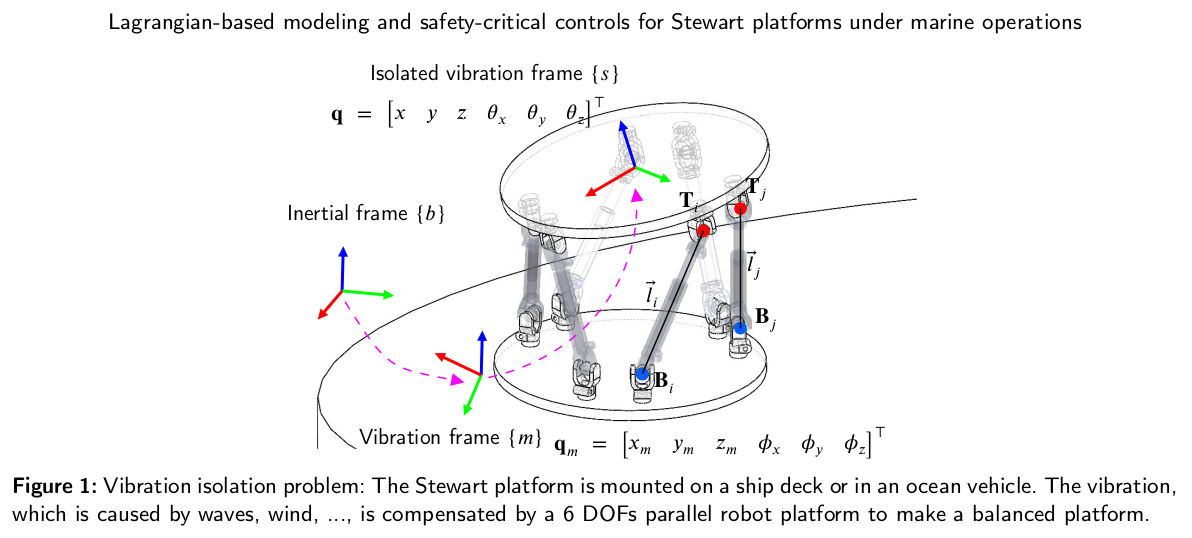
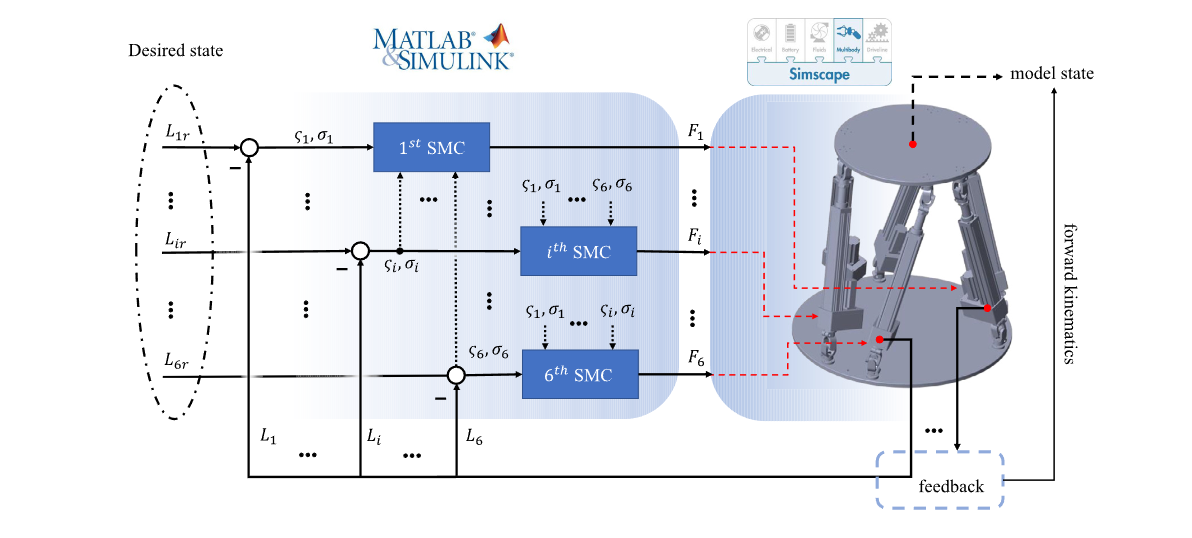
📝 Lagrangian-based modeling and safety-critical controls for Stewart platforms under marine operations
Duc Cuong Vu, Danh Huy Nguyen, Minh Nhat Vu, and Tung Lam Nguyen
Ocean Engineering, 2025 (SCIE, Q1)

📝 Unifying Hierarchical Sliding Mode Control and Control Barrier Function for Tilt Angle Constraint of a Ball-Balancing Robot
Thi Thuy Hang Nguyen, Duc Cuong Vu, Minh Duc Pham, Tung Lam Nguyen, and Thi-Van-Anh Nguyen
IET Cyber-Systems and Robotics, 2025 (SCIE, Q3)
[Accepted manuscript]
📝 CBFs-based Model Predictive Control for Obstacle Avoidance with Tilt Angle Limitation for Ball-Balancing Robots
Minh Duc Pham, Duc Cuong Vu, Thi Thuy Hang Nguyen, Thi Van Anh Nguyen, Minh Nhat Vu, and Tung Lam Nguyen
IEEE Access, 2025 (SCIE, Q2)
📝 A novel approach of Consensus-based Finite-time Distributed Sliding Mode Control for Stewart platform manipulators motion tracking
Duc Cuong Vu, Danh Huy Nguyen, and Tung Lam Nguyen
Results in Engineering, 2025 (ESCI, Q1)
📝 Time-optimal trajectory generation and observer-based hierarchical sliding mode control for ballbots with system constraints
Duc Cuong Vu, Minh Duc Pham, Thi Thuy Hang Nguyen, Thi Van Anh Nguyen, and Tung Lam Nguyen
International Journal of Robust and Nonlinear Control, 2024 (SCIE, Q1)
💼 work experience
Supervised by PhD. Chinh Hoang Duc (PI) and Assoc.Prof.PhD. Tung Lam Nguyen.
Project: Robot navigation system integrating sensor network and wireless communication.
Supervised by PhD. Minh Nhat Vu (PI) and Assoc.Prof.PhD. Tung Lam Nguyen.
Project: Advanced Control of a Ship-Mounted Stewart Platform for Marine Applications (KIST).
Supervised by Assoc.Prof.PhD. Tung Lam Nguyen.
Project: Design control structures for Parallel Platforms in Maritime applications (VinIF).
Supervised by Assoc.Prof.PhD. Tung Lam Nguyen.
Project: Balancing, motion planning, and tracking control for ballbot systems.